
Scenarios
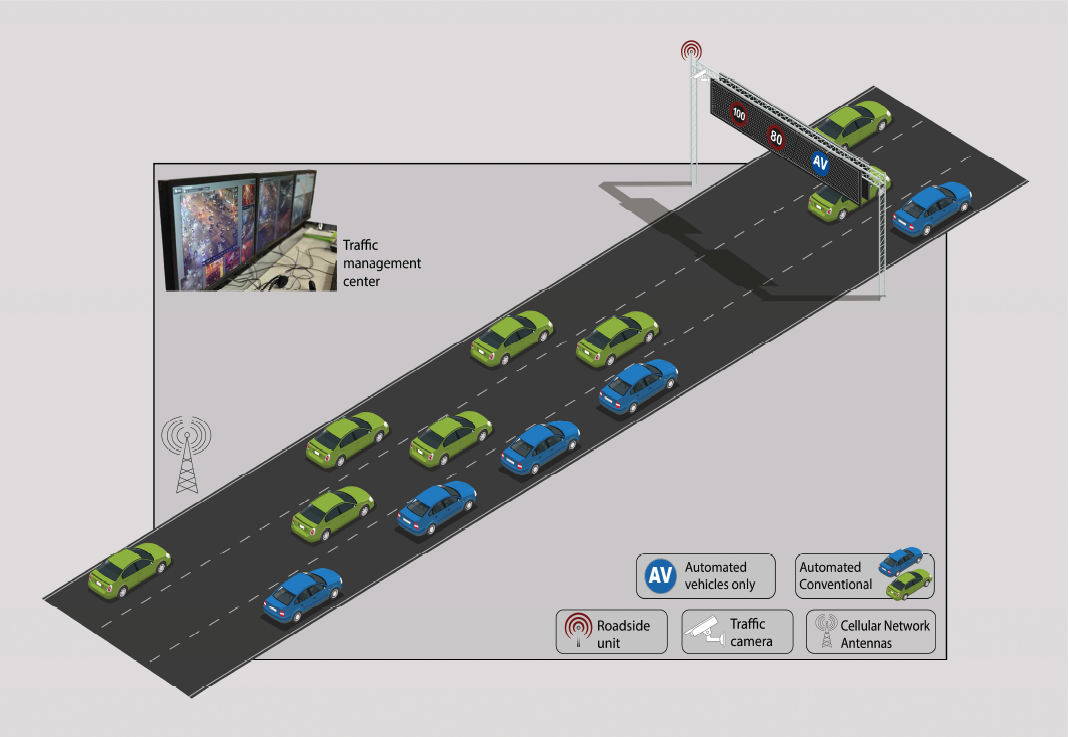
Dynamic lane assignment to automated driving
The assignment of a dedicated lane to automated traffic is expected to reduce the safety concerns around the penetration of the automated vehicles to conventional traffic. One of the targets of this scenario is to understand how to balance mixed traffic in order to maintain the traffic throughput at least at the same level, as in case of today’s traffic consisted of conventional vehicles only. During this process, parameters such as the penetration rate of automated vehicles and the prevailing traffic conditions will be considered. In addition, speed limits per lane or road segment will be dynamically adapted taking into account also potential adverse weather conditions. The study of this scenario, in simulation and in real conditions, will give us insights on how to manage in an efficient manner mixed traffic flows on normal highway segments. It will provide proper indicators for activation and deactivation of lanes assigned to automated vehicles, customized speed and lane recommendations for all vehicles on this segment based on prevailing traffic conditions and also visual and electronic ways for informing all vehicles and drivers involved.
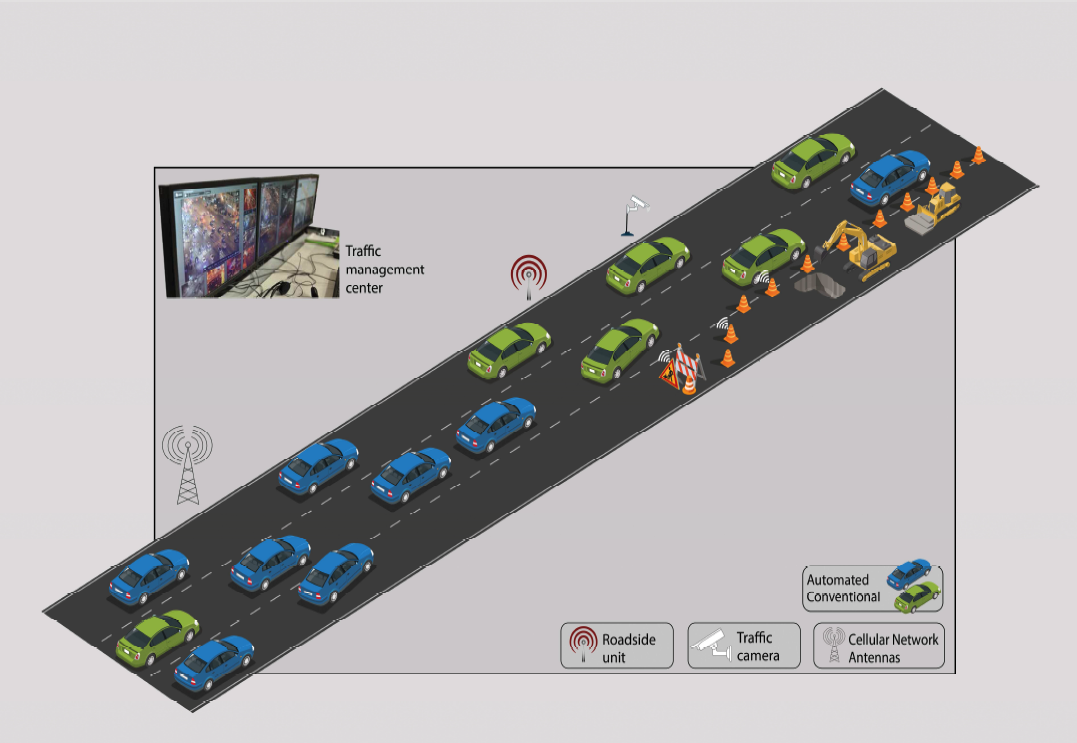
Roadworks zones
Roadworks zones are major safety hotspots with many accidents both for vehicles and for the staff on site. They pose interesting challenges for efficient coordination of mixed traffic flows, where the infrastructure should help the vehicles by providing extended information in real-me such as updated maps (e.g. including the temporary yellow lanes), additional traffic signs, reference points on the spot for accurate localization for automated vehicles, new traffic control measures etc. in the particular region. Both the physical and the digital infrastructure should be prepared to accommodate such situations. The target of this scenario is to guide in an efficient and safe way mixed traffic through roadworks zones by providing accurate Information in these areas both to automated vehicles through electronic signals and up-to-date digital maps (electronic horizon) and to conventional vehicles through guidance to their nomadic devices, visual signs and other physical elements (e.g. cones).
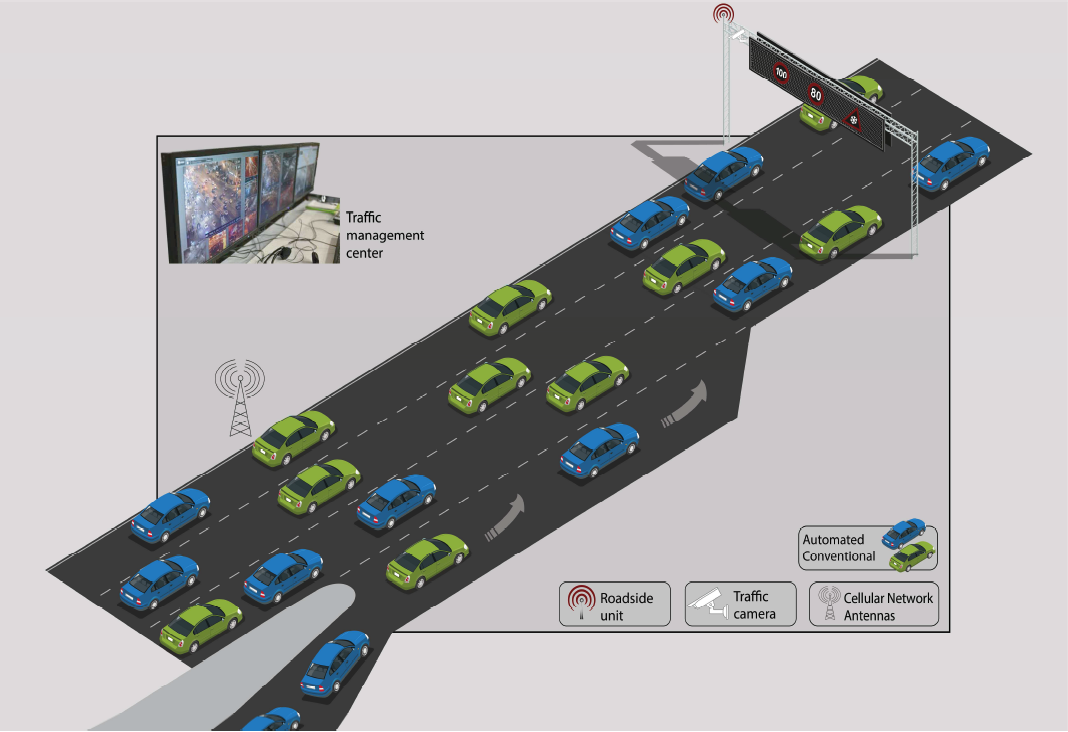
Bottlenecks
The scope of this scenario is to investigate real-me controllers, involving a variety of control measures, such as dynamic speed limits, merge assistance and ramp metering, to manage mixed traffic situations in front of bottlenecks of various kinds (onramps, off-ramps, lane drops, tunnels, bridges, sags) and avoid traffic flow degradation. In addition, solutions for in-vehicle and on-road signage will be examined. An analysis of several use cases regarding different types of bottlenecks, with different penetration rates of automated vehicles, will take place. In addition, innovative control strategies, such as the exploitation of the automated vehicles capabilities by suggesting (real-me) an appropriate value for the me-gap parameter and vehicle acceleration behaviour, the distribution of the vehicles across lanes so as to match a prespecified opportune lane distribution scheme depending on traffic, as well as the Mainstream Traffic Flow Control (MTFC), will be investigated, aiming to improve traffic efficiency and safety (e.g. avoid deadlocks) in such cases. Proper guidance will be provided both for automated and for conventional vehicles (e.g. conventional vehicles with ACC (SAE level 2) that communicate with Traffic Management Center).